|
John Ettridge’s Rotary Wing Flying Machine
The first Flying machines were invented about 1902 and had fixed wings, followed by what we now call Quadcopter (Drones) in 1920, followed by the Helicopter in 1939, with its rotor and tail rotor design. Flying Machine’s technology has remained surprisingly static over the last 70 plus years. While there are a number of good reasons for conservatism in any design process, perhaps the most significant point is that it is only relatively recently the electronic equipment have become cheap enough, and rugged enough, to be appropriate for new innovation. Up until around 2005 it was still customary to use hands on, manual remote controls, as relevant electronic stabilizers and gyroscopes, were not considered for the demands of commercial applications. And it took even longer for electronic stabilizers and gyroscopes to be made available for low cost private experimentation. The result was an industry that became surprisingly fixed in its ways, for which innovation could only come from outside of the industry. While fixed Wing planes, Helicopters and Quadcopters have found increasing popularity in recent years, as the advantage of high efficiency becomes more widely appreciated, the traditional prejudice of aeronautics designers against alternative designs, means this area of alternative designs research is still relatively unexplored. John Ettridge is a Gold Medals award winning inventor who has invested the time required to pursue alternative designs and configurations. His research began out of frustration with conventional designs, which it seemed to him were grossly inefficient, difficult to repair, and unimaginative, they could not even compete with a bird, that is they could not do all three things, the essentials of flight, have vertical take off and landing, hover stationary, and have high speed manoeuvrablity.
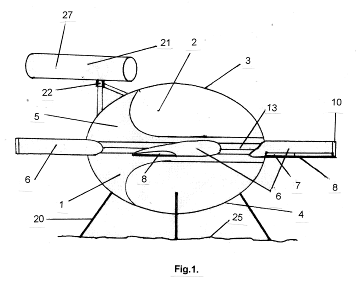
From the Ettridge patent Fig.1., the Object of this invention is to improve the application and efficiency of the essentials of flight, into one aircraft, so it can lift off and land vertically, without the need of a runway, can fly without the need that the cockpit tilts from horizontal level plane, can glide if the motor is not in use and have high speed manoeuvability. It can also carry a heavier payload for the amount of energy used to stay airbourne, with a greater variation of airspeed and manoevrability. It can be configured for a Drone, Commercial Aircraft to a Space ship. This is achieve by instead of using a fixed wings, the wing sections are mounted so they rotate around the fuselarge, with all the normal functions of a fixed wing
Instead of the fixed outrigger (tail) rotor used by helicopters to counter balance the torque, or rotating force, generated by a single, main rotor acting to force the fuselage to rotate, it uses an electric turbine, which can rotate to achieve the same job, but as the drone moves forward, the turbine can pivot to act as a means of providing forward movement to the fuselage at the same time. The aerodynamics on the wing sections, allow the wing sections to stop rotating and lock in position, so now the electric turbine can move to line up with the front of the fuselage and be used to move the Drone at speed in the required direction.
The flaps on the wing sections are operated individually and serve the same function as an conventional aeroplane. To understand this Rotary Wing flying drone, it does not matter if the wings are fixed, or they rotate in a circle, the air speed over the wing skin is the same at the required number of revolutions, and generates the same amount of lift. Unlike a helicopter which uses thin blades and high r.p.m.s, the wing sections turn at lower r.p.m. and use the wing section to create lift. UK patent number: GB2567299 Title: Rotary wing flying machine.
|